Description
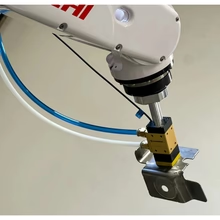
Intended for use with collaborative robotic arms, the Cobot MagBase firmly fixtures 10 kg payload collaborative robots on ferrous materials with a twist of the wrist.
Magswitch pivoting arrays can be anchored to flat and cylindrical surfaces and feature a wide footprint to reduce the risk of peel when the end effector is at its greatest radius. The array pivot points contain electrically isolating bushings and washers to ensure welding and static transient voltages on the part/substrate are decoupled from the robot ground.
Refer to the dimensional drawings for the default mounting pattern. Custom patterns can be incorporated upon request.
SPECIFICATIONS
| Nominal Maximum Breakaway Force | 22072 N |
| Nominal Maximum Shear | 4846 N |
| Full Saturation Thickness | 0.75 in / 19.1 mm |
| Net Weight | 66 lbs / 30 kg |
| Individual Magnetic Pole Footprint | 2.8″ x 11.7″ / 71mm x 296mm |
| Overall Magnetic Pole Footprint | 15.0″x 11.7″ / 381mm x 296mm |